このページの内容は最新ではありません。最新版の英語を参照するには、ここをクリックします。
frest.findSources
名前空間: frest
時変ソース ブロックを特定します。
説明
Simulink® モデルの時変ソース ブロックは、線形化システムの操作点からモデルを離して、周波数応答推定を妨げる可能性があります。関数 frest.findSources を使用して、モデル内のそのような時変ソースを特定できます。次に、frestimate を使用して周波数応答を推定する前に、特定したソースを無効にすることができます。詳細については、周波数応答推定に対する時変ソース ブロックの影響を参照してください。
例
周波数応答推定の時変ソース ブロックの無効化
時変ソース ブロックを含むモデルを開きます。
mdl = "scdspeed_ctrlloop";
open_system(mdl)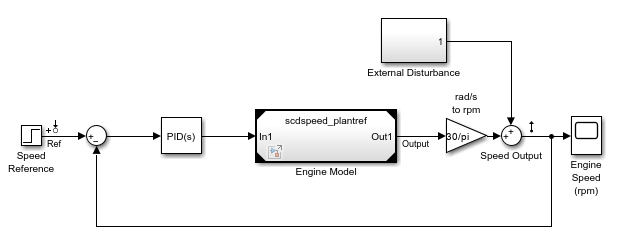
正確な線形化のために、エンジン参照モデルをノーマル シミュレーション モードに設定します。
set_param("scdspeed_ctrlloop/Engine Model",... "SimulationMode","Normal")
モデルで定義されている線形解析ポイントを取得します。
io = getlinio(mdl);
時変ソース ブロックを無効にすることなく、モデルの周波数応答を推定します。sinestream 入力信号を定義し、推定周波数応答 sysest を定義します。
in = frest.Sinestream(... "Frequency",logspace(1,2,10),... "NumPeriods",30,... "SettlingPeriods",25); [sysest,simout] = frestimate(mdl,io,in);
推定結果に対する時変ソースの影響を表示するには、モデルの正確な線形化を計算して推定応答と比較します。
sys = linearize(mdl,io);
bodemag(sys,sysest,'r*')推定される周波数応答は正確な線形化とは一致しません。モデル内の時変ソース ブロックにより応答が安定状態にならないために、このような不一致が発生します。
時変ソース ブロックを見つけます。
srcblks = frest.findSources(mdl);
ソース ブロックを無効にするには、まず frestimateOptions オブジェクトを作成して、BlocksToHoldConstant パラメーターを時変ソース ブロックに設定します。
opts = frestimateOptions("BlocksToHoldConstant",srcblks);時変ソース ブロックを無効にした状態で周波数応答を推定します。
[sysest2,simout2] = frestimate(mdl,io,in,opts);
推定応答 sysest2 と正確な線形化の結果を比較します。
bodemag(sys,sysest2,'r*')推定応答は正確な線形化に一致しています。
入力引数
出力引数
ヒント
周波数応答推定時に時変ソース ブロックを無効にするには、まず
frestimateOptionsオブジェクトを作成して、そのBlocksToHoldConstantプロパティをblocksまたはblocksのサブセットに設定します。次に、関数frestimateを使用して周波数応答を推定します。modelに、線形化出力ポイントの信号パス内にソース ブロックを含んでいる参照モデルが含まれている場合、frest.findSourcesを使用してソースを見つける前に参照モデルをノーマル シミュレーション モードに設定します。
代替機能
Simulink モデル アドバイザーを使用して、モデル内の出力線形解析ポイントの信号パスに時変ソース ブロックが存在するかどうかを調べることができます。そのためには、モデル アドバイザー チェックSimulink Control Design のチェックを使用します。モデル アドバイザーの使用の詳細については、モデル アドバイザーを使用したモデルのチェックを参照してください。
モデル線形化器アプリで周波数応答を推定する際に、モデル内の時変ソースを見つけて無効にすることができます。
バージョン履歴
R2010b で導入
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)