Simulink Real-Time および Speedgoat を使用すると、シミュレーションからクリック 1 つで、ラピッド コントロール プロトタイピング (RCP) とハードウェアインザループ (HIL) テストに移行できます。これらの製品では、MATLAB および Simulink を使用して、電子コントロール ユニットや物理システムに接続します。
Simulink モデルから直接、または MATLAB API と App Designer を使用して、Speedgoat リアルタイム ターゲット コンピューターで実行するリアルタイム アプリケーションを作成、制御、および計測できます。電気モーター、電気自動車やパワートレイン、風力タービン、電力コンバーター、バッテリー マネジメント システム、ロボットやマニピュレーター、自律システム、およびその他のデバイスの制御設計やダイナミクスのシミュレーションおよびテストを行うことができます。
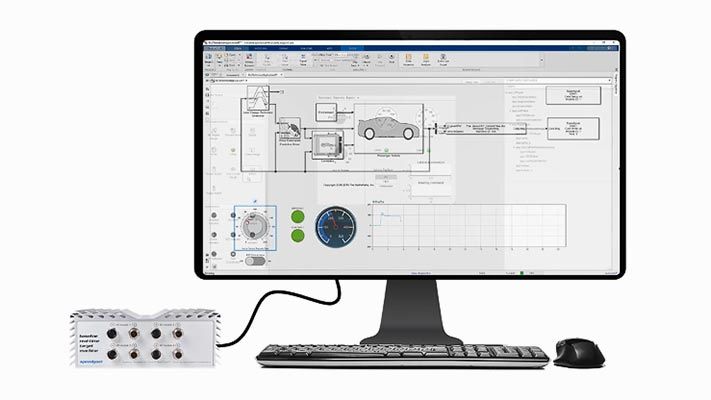

リアルタイム アプリケーションの作成
MATLAB と Simulink を離れることなく、デスクトップ シミュレーションからクリック 1 つでリアルタイムテストに移行します。モデルを構成し、リアルタイム アプリケーションを作成、実行、および操作します。
ドキュメンテーション | 例

Speedgoat ハードウェアでのテストの実行
Speedgoat リアルタイムシステムは、Simulink Real-Time 用に作成されています。モデル内に I/O ブロックをドラッグ アンド ドロップします。サポートされている通信インターフェイスには、CAN、Modbus、ARINC、SPI などがあります。

パワー エレクトロニクス制御のテスト
Speedgoat ハードウェアをプラットフォームとして使用し、パワー エレクトロニクス、電気駆動装置、および電力システムの制御アルゴリズムのプロトタイピングおよび HIL テストを実施します。高電圧機器を使用したパワー ハードウェアインザループ (P-HIL) テストを実行します。
ドキュメンテーション | 例

デスクトップアプリの作成とデプロイ
App Designer を使用して MATLAB でアプリを設計し、リアルタイム アプリケーションのパラメーターを調整して、信号を可視化します。MATLAB Compiler を使用してアプリをデプロイします。
ドキュメンテーション | 例
自動テストの作成、管理、
および実行 Simulink Test を使用して自動テストを実行するか、またはサードパーティ フレームワーク向けの ASAM XIL 規格を使用します。Windows サーバーおよび Linux サーバーの CI/CD ワークフロー用に RCP テストと HIL テストを統合します。
ドキュメンテーション | 例

物理システムのリアルタイム シミュレーション
Simscape を使用して、HIL シミュレーション用に物理システムのモデルをすばやく作成します。Simscape Electrical、Powertrain Blockset、および Motor Control Blockset には、事前構成済みの例が含まれています。

ECU バイパス
CAN または UDP 経由で実際の ECU の計測値を取得し、シミュレーションを行うことで、ECU 機能をバイパスします。

FPGA ハードウェア アクセラレーション
FPGA テクノロジーと HDL Coder を使用して、サンプルレートを高速化します。スイッチングレベルのパワー エレクトロニクス HIL シミュレーションのために、Speedgoat FPGA で Simscape Electrical 非線形モデルを実行します。

AI (人工知能) モデルの実行
リアルタイムシステムにディープラーニング、機械学習、および強化学習モデルを展開します。
製品リソース:
「Simulink、Simscape、HDL Coder を使用すると、プラントモデルを開発して、HIL テスト用に FPGA に直接展開できます。これは、大規模パワー エレクトロニクス システムをシミュレーションする実用的かつ妥協のない方法です。」
Henry Brengel, Leonardo DRS
質問はありますか?



また、以下のリストから Web サイトを選択することもできます。
南北アメリカ
- América Latina (Español)
- Canada (English)
- United States (English)
ヨーロッパ
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
アジア太平洋地域
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)