Computer Vision Toolbox は、コンピューター ビジョンや 3D ビジョン、動画処理システムの設計やテストを行うためのアルゴリズム、関数、アプリを提供します。オブジェクトの検出や追跡のほか、特徴点の検出、抽出、マッチングを行うことができます。単一カメラ、ステレオカメラ、魚眼カメラのキャリブレーションワークフローを自動化することができます。3D ビジョンでは、ツールボックスが Visual SLAM および点群 SLAM、ステレオビジョン、structure from motion (SfM)、点群処理をサポートしています。コンピューター ビジョン アプリでは、グラウンドトゥルースのラベル付けやカメラ キャリブレーションのワークフローの自動化を行うことができます。
YOLO や SSD、ACF などのディープラーニング アルゴリズムや機械学習アルゴリズムを使用すると、カスタムのオブジェクト検出器の学習を行うことができます。セマンティック セグメンテーションとインスタンス セグメンテーションには、U-Net や Mask R-CNN などのディープラーニング アルゴリズムを使用することができます。このツールボックスには、サイズが大きすぎてメモリに収まりきらない画像を解析するための、オブジェクト検出とセグメンテーションのアルゴリズムが用意されています。事前学習済みのモデルを使用すると、顔や歩行者、その他の一般的なオブジェクトを検出できます。
アルゴリズムを高速化するには、マルチコアプロセッサや GPU 上で実行します。ツールボックスのアルゴリズムでは、C/C++ コード生成がサポートされており、既存のコードとの統合やデスクトップ プロトタイピング、組み込みビジョンシステムの展開などを行うことができます。

ドキュメンテーション | 例

ディープラーニングと機械学習
事前学習済みのディープラーニングおよび機械学習ベースのオブジェクト検出およびセグメンテーション ネットワークを学習または使用します。これらのネットワークの性能評価を行い、C/C++ または CUDA® コードとして展開します。
ドキュメンテーション | 例

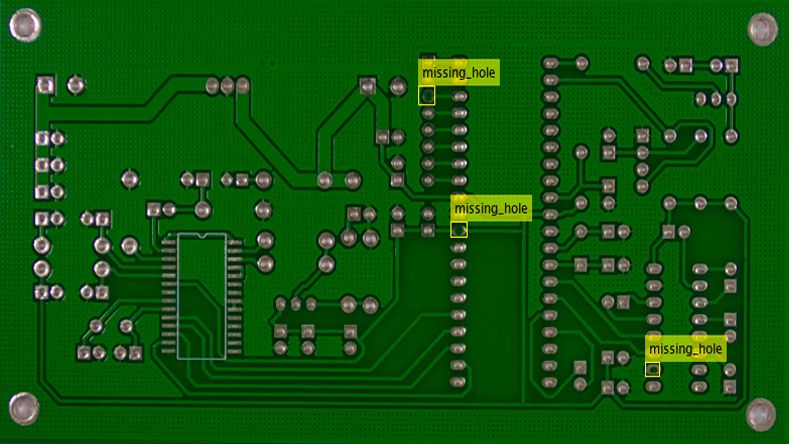
自動外観検査
Computer Vision Toolbox の Automated Visual Inspection Library を使用して異常や欠陥を特定し、製造の品質保証プロセスを支援および改善します。
ドキュメンテーション | 例

カメラ キャリブレーション
カメラ キャリブレーションとステレオ カメラ キャリブレーションのアプリを使用して、単眼カメラとステレオカメラの内部パラメーター、外部パラメーター、およびレンズ歪みのパラメーターを推定します。
ドキュメンテーション | 例

Visual SLAM と 3D ビジョン
複数の 2D ビューからシーンの 3D 構造を抽出します。ビジュアルオドメトリを使用して、カメラの動きと姿勢を推定します。Visual SLAM を使用して姿勢の推定を調整します。
ドキュメンテーション | 例
LiDAR 点群と 3D 点群の処理
LiDAR、ステレオ、または RGBD センサーからの点群データを使用して、幾何学的形状のセグメンテーション、クラスタリング、ダウンサンプリング、ノイズ除去、レジストレーション、および当てはめを行います。Lidar Toolbox は、LiDAR 処理システムの設計、解析、テストを行うための追加機能を提供します。
ドキュメンテーション | 例

特徴の検出、抽出、およびマッチング
複数の画像から、ブロブ、エッジ、コーナーなどの特徴を検出、抽出、およびマッチングします。複数画像間で一致した特徴は、レジストレーション、オブジェクト分類、または SLAM などの複雑なワークフローで使用することができます。
ドキュメンテーション | 例

コード生成とサードパーティのサポート
コンピューター ビジョン アルゴリズムの開発をラピッド プロトタイピング、実装および検証のワークフローと統合します。OpenCV に基づくプロジェクトと関数を、MATLAB や Simulink に統合します。
ドキュメンテーション | 例
製品リソース:

「データの注釈付けからディープラーニング モデルの選択、学習、テスト、微調整に至るまで、MATLAB には当社が必要とするすべてのツールが用意されていました。また、GPU の使用経験は限られていましたが、GPU Coder を使用することで NVIDIA GPU にすばやく展開できました。」
Valerio Imbriolo, Drass Group
あなたは学生ですか?
ご所属の学校にはすでに Campus-Wide License が導入されていて、MATLAB、Simulink、その他のアドオン製品を利用できる可能性があります。
次のトピック



また、以下のリストから Web サイトを選択することもできます。
南北アメリカ
- América Latina (Español)
- Canada (English)
- United States (English)
ヨーロッパ
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
アジア太平洋地域
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)