lqi
線形 2 次積分制御
構文
[K,S,e] = lqi(SYS,Q,R,N)
説明
lqi は、次の図に示すトラッキング ループに対する最適な状態フィードバック制御則を計算します。
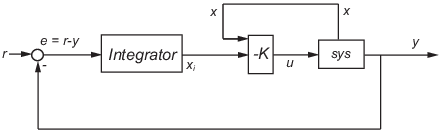
プラント sys に次の状態空間方程式 (または離散時間での等価な方程式) が成り立つとします。
状態フィードバック制御は、次の形式となります。
ここで、xi は積分器の出力です。この制御則は、出力 y が設定値 r を追従するようにします。MIMO システムの場合、積分器の数は、出力 y の次元と同じです。
[K,S,e] = lqi(SYS,Q,R,N) は、プラントの状態空間モデル SYS と重み行列 Q、R、N とで最適なゲイン行列 K を計算します。制御則 u = –Kz = –K[x;xi] は、次のコスト関数を最小化します (r = 0 の場合)
(連続時間)
(離散時間)
離散時間の場合、lqi は次の前進オイラー式を使用して積分器の出力 xi を計算します。
ここで、Ts は SYS のサンプル時間です。
行列 N を省略すると、N は 0 に設定されます。また lqi は、関連する代数リカッチ方程式の解 S と閉ループの固有値 e を返します。
制限
拡張された積分器をもつプラントで、次の状態空間システムを考えます。
問題のデータは以下の条件を満たさなければなりません。
(A,B) のペアは可安定でなければならない。
R は正定値でなければならない。
は半正定値 (つまり ) でなければならない。
の虚軸 (離散時間の場合は単位円) に不可観測モードがあってはならない。
ヒント
lqi は正則な E をもつ記述子モデルをサポートします。lqi の出力 S は、次の等価な陽的状態空間モデルに対するリカッチ方程式の解です。
参考文献
[1] P. C. Young and J. C. Willems, "An approach to the linear multivariable servomechanism problem", International Journal of Control, Volume 15, Issue 5, May 1972 , pages 961–979.
バージョン履歴
R2008b で導入
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)