frd
周波数応答データ モデル
説明
frd を使用して実数値の、または複素数値の周波数応答データ モデルを作成したり、動的システム モデルを周波数応答データ モデル形式に変換したりします。
周波数応答データ モデルは、複素数の周波数応答データを、対応する周波数点と共に保存します。たとえば、周波数応答データ モデル H(jwi) は、各入力周波数 wi における周波数応答を保存します。ここで i = 1,…,n です。frd モデル オブジェクトは SISO または MIMO 周波数応答データ モデルを連続時間または離散時間で表現できます。詳細については、周波数応答データ (FRD) モデルを参照してください。
frd を使用して、一般化周波数応答データ (genfrd) モデルを作成することもできます。
作成
frd モデルを次のいずれかの方法で取得できます。
frdコマンドを使用して周波数応答データからモデルを作成する。たとえば、特定の周波数で取得した周波数応答データを使用してfrdモデルを作成できます。例については、SISO 周波数応答データ モデルを参照してください。
特定の周波数でのモデルの周波数応答を計算することで、
ssモデルのような線形モデルを、frdモデルに変換する。例については、状態空間モデルを周波数応答データ モデルに変換を参照してください。
オフラインの周波数応答推定ワークフローを使用してモデルを推定する。これらのワークフローでは Simulink® Control Design™ ソフトウェアが必要です。
詳細については、コマンド ラインでの周波数応答の推定 (Simulink Control Design)およびモデル線形化器を使用した周波数応答の推定 (Simulink Control Design)を参照してください。
構文
説明
sys = frd(___,Name,Value)
入力引数
プロパティ
オブジェクト関数
以下のリストには、frd モデルで使用できる関数の代表的なサブセットが含まれています。一般に、動的システム モデルに適用できる多くの関数も frd オブジェクトに適用できます。frd モデルは、すべての時間領域解析関数で機能しません。
例
SISO 周波数応答データ モデル
周波数応答データから frd オブジェクトを作成します。
この例では、水タンク モデル用に収集された周波数応答データを読み込みます。
load wtankData.matこのデータには、周波数範囲 rad/s から rad/s までについて収集された周波数応答データが含まれます。
モデルを作成します。
sys = frd(response,frequency)
sys =
Frequency(rad/s) Response
---------------- --------
0.0010 1.562e+01 - 1.9904i
0.0018 1.560e+01 - 2.0947i
0.0034 1.513e+01 - 3.3670i
0.0062 1.373e+01 - 5.4306i
0.0113 1.047e+01 - 7.5227i
0.0207 5.829e+00 - 7.6529i
0.0379 2.340e+00 - 5.6271i
0.0695 7.765e-01 - 3.4188i
0.1274 2.394e-01 - 1.9295i
0.2336 7.216e-02 - 1.0648i
0.4281 2.157e-02 - 0.5834i
0.7848 6.433e-03 - 0.3188i
1.4384 1.916e-03 - 0.1740i
2.6367 5.705e-04 - 0.0950i
4.8329 1.698e-04 - 0.0518i
8.8587 5.055e-05 - 0.0283i
16.2378 1.505e-05 - 0.0154i
29.7635 4.478e-06 - 0.0084i
54.5559 1.333e-06 - 0.0046i
100.0000 3.967e-07 - 0.0025i
Continuous-time frequency response.
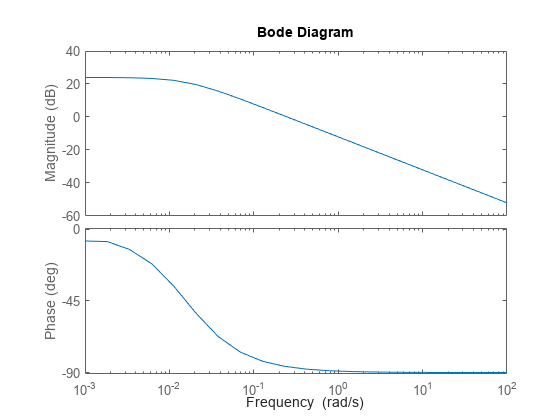
sys をプロットします。
bode(sys)
離散時間 MIMO 周波数応答データ モデル
この例では、ランダムに生成された応答データと周波数について考えます。
3 x 2 x 7 の複素数配列と、0.01 rad/s から 100 rad/s までの間の 7 つの点をもつ周波数ベクトルを生成します。サンプル時間 Ts を 5 秒に設定します。
rng(0) r = randn(3,2,7)+1i*randn(3,2,7); w = logspace(-2,2,7); Ts = 5;
モデルを作成します。
sys = frd(r,w,Ts)
sys =
From input 1 to:
Frequency(rad/s) output 1 output 2 output 3
---------------- -------- -------- --------
0.0100 0.5377 + 0.3192i 1.8339 + 0.3129i -2.2588 - 0.8649i
0.0464 -0.4336 + 1.0933i 0.3426 + 1.1093i 3.5784 - 0.8637i
0.2154 0.7254 - 0.0068i -0.0631 + 1.5326i 0.7147 - 0.7697i
1.0000 1.4090 - 1.0891i 1.4172 + 0.0326i 0.6715 + 0.5525i
4.6416 0.4889 - 1.4916i 1.0347 - 0.7423i 0.7269 - 1.0616i
21.5443 0.8884 - 0.1924i -1.1471 + 0.8886i -1.0689 - 0.7648i
100.0000 0.3252 - 0.1774i -0.7549 - 0.1961i 1.3703 + 1.4193i
From input 2 to:
Frequency(rad/s) output 1 output 2 output 3
---------------- -------- -------- --------
0.0100 0.8622 - 0.0301i 0.3188 - 0.1649i -1.3077 + 0.6277i
0.0464 2.7694 + 0.0774i -1.3499 - 1.2141i 3.0349 - 1.1135i
0.2154 -0.2050 + 0.3714i -0.1241 - 0.2256i 1.4897 + 1.1174i
1.0000 -1.2075 + 1.1006i 0.7172 + 1.5442i 1.6302 + 0.0859i
4.6416 -0.3034 + 2.3505i 0.2939 - 0.6156i -0.7873 + 0.7481i
21.5443 -0.8095 - 1.4023i -2.9443 - 1.4224i 1.4384 + 0.4882i
100.0000 -1.7115 + 0.2916i -0.1022 + 0.1978i -0.2414 + 1.5877i
Sample time: 5 seconds
Discrete-time frequency response.
指定されたデータは、結果として 2 入力、3 出力の frd モデルとなります。
継承されたプロパティをもつ周波数応答データ モデル
この例では、伝達関数モデルから継承されたプロパティをもつ周波数応答データ モデルを作成します。
TimeUnit プロパティが 'minutes' に、InputDelay プロパティが 3 に設定された伝達関数 sys1 を作成します。
numerator1 = [2,0]; denominator1 = [1,8,0]; sys1 = tf(numerator1,denominator1,'TimeUnit','minutes','InputDelay',3)
sys1 =
2 s
exp(-3*s) * ---------
s^2 + 8 s
Continuous-time transfer function.
propValues1 = {sys1.TimeUnit,sys1.InputDelay}propValues1=1×2 cell array
{'minutes'} {[3]}
sys1 から継承されたプロパティをもつ frd モデルを作成します。
rng(0) response = randn(1,1,7)+1i*randn(1,1,7); w = logspace(-2,2,7); sys2 = frd(response,w,sys1)
sys2 =
Frequency(rad/minute) Response
--------------------- --------
0.0100 0.5377 + 0.3426i
0.0464 1.8339 + 3.5784i
0.2154 -2.2588 + 2.7694i
1.0000 0.8622 - 1.3499i
4.6416 0.3188 + 3.0349i
21.5443 -1.3077 + 0.7254i
100.0000 -0.4336 - 0.0631i
Input delays (minutes): 3
Continuous-time frequency response.
propValues2 = {sys2.TimeUnit,sys2.InputDelay}propValues2=1×2 cell array
{'minutes'} {[3]}
frd モデル sys2 が sys1 と同じプロパティをもっていることを確認します。
周波数応答データ モデルの状態名と入力名の指定
この例では、水タンク モデル用に収集された周波数応答データを読み込みます。
load wtankData.matこのモデルには 1 つの入力 Voltage と 1 つの出力 Water height があります。
入力名と出力名を指定して、frd モデルを作成します。
sys = frd(response,frequency,'InputName','Voltage','OutputName','Height');
周波数応答をプロットします。
bode(sys)
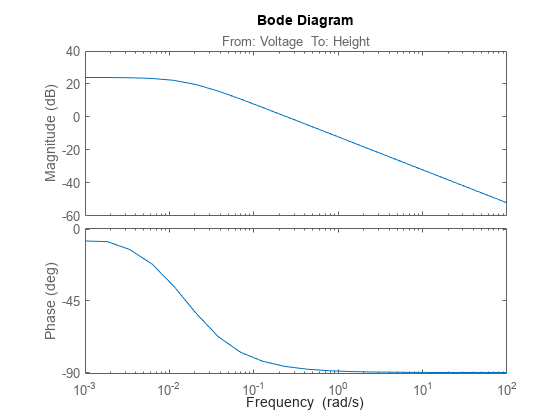
入力名と出力名がボード線図に表示されます。入力と出力に名前を付けるのは、MIMO システムで応答プロットを扱うときに有用である可能性があります。
状態空間モデルを周波数応答データ モデルに変換
この例では、次の状態空間モデルの frd モデルを計算します。
状態空間行列を使用して状態空間モデルを作成します。
A = [-2 -1;1 -2]; B = [1 1;2 -1]; C = [1 0]; D = [0 1]; ltiSys = ss(A,B,C,D);
状態空間モデル ltiSys を周波数 0.01 rad/s から 100 rad/s までの間について frd モデルに変換します。
w = logspace(-2,2,50); sys = frd(ltiSys,w);
周波数応答を比較します。
bode(ltiSys,'b',sys,'r--')
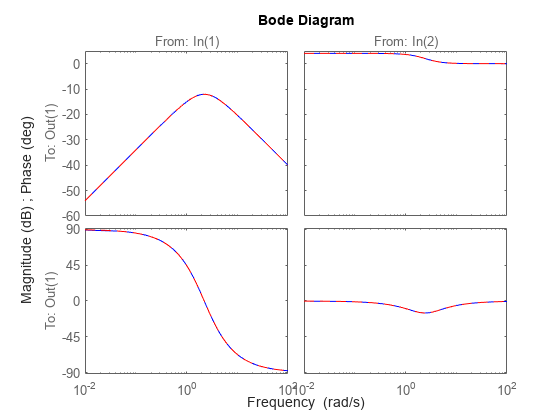
応答は一致します。
周波数応答データ モデルの配列
frd モデルの配列を作成するには、周波数応答データの多次元配列を指定できます。
たとえば、サイズ [NY NU NF S1 ... Sn] の数値配列として応答データを指定する場合、関数は frd モデルの S1 x ...-x Sn の配列を返します。これらの各モデルには NY の出力、NU の入力、および NF の周波数点があります。
0.1 rad/s から 10 rad/s までの間の 10 の周波数点において、1 出力、2 入力をもつモデルについて、2 行 3 列のランダムな応答データの配列を生成します。
w = logspace(-1,1,10); r = randn(1,2,10,2,3)+1i*randn(1,2,10,2,3); sys = frd(r,w);
モデルの配列からインデックス (2,1) でモデルを抽出します。
sys21 = sys(:,:,2,1)
sys21 =
From input 1 to:
Frequency(rad/s) output 1
---------------- --------
0.1000 0.6715 + 0.0229i
0.1668 0.7172 - 1.7502i
0.2783 0.4889 - 0.8314i
0.4642 0.7269 - 1.1564i
0.7743 0.2939 - 2.0026i
1.2915 0.8884 + 0.5201i
2.1544 -1.0689 - 0.0348i
3.5938 -2.9443 + 1.0187i
5.9948 0.3252 - 0.7145i
10.0000 1.3703 - 0.2248i
From input 2 to:
Frequency(rad/s) output 1
---------------- --------
0.1000 -1.2075 - 0.2620i
0.1668 1.6302 - 0.2857i
0.2783 1.0347 - 0.9792i
0.4642 -0.3034 - 0.5336i
0.7743 -0.7873 + 0.9642i
1.2915 -1.1471 - 0.0200i
2.1544 -0.8095 - 0.7982i
3.5938 1.4384 - 0.1332i
5.9948 -0.7549 + 1.3514i
10.0000 -1.7115 - 0.5890i
Continuous-time frequency response.
負の周波数をもつ周波数応答データ モデル
frd オブジェクトで負の周波数値を指定できます。この機能は、複素係数をもつモデルの周波数応答データを取得するときに有用です。
正の値と負の値の両方をもつ周波数ベクトルを作成します。
w0 = sort([-logspace(-2,2,50) 0 logspace(-2,2,50)]);
複素係数をもつ状態空間モデルを作成します。
A = [-3.50,-1.25-0.25i;2,0]; B = [1;0]; C = [-0.75-0.5i,0.625-0.125i]; D = 0.5; Gc = ss(A,B,C,D);
このモデルを、指定された周波数で frd モデルに変換します。
sys = frd(Gc,w0);
モデルの周波数応答をプロットします。
bode(Gc,'b',sys,'r--')
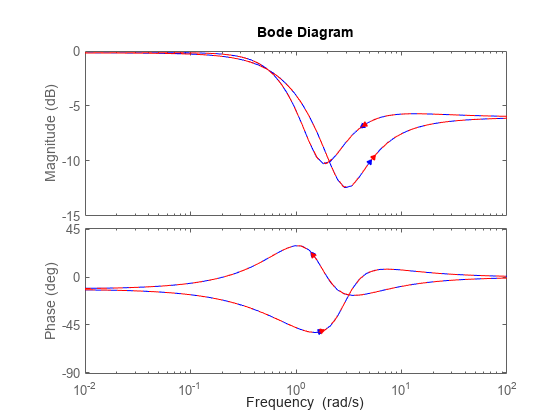
このプロット応答はほぼ一致します。プロットは、複素係数をもつモデルに対して、1 つは右向き矢印を使った正の周波数、もう 1 つは左向き矢印を使った負の周波数の 2 つの分岐を示します。両方の分岐で、矢印は周波数の増加の方向を示します。
バージョン履歴
R2006a より前に導入
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)